Mars Pathfinder
Images: July, 1997
All photos NASA.

July 28 (Sol 24) |
This is a close-up of the sunset on Sol 24. The red sky
in the background and the blue around the Sun are approximately as they
would appear to the human eye. The color of the Sun itself is not right
-- the Sun was over exposed in each of the 3 color images that were used
to make this picture.The true color of the Sun itself may be near white
or slightly bluish. |

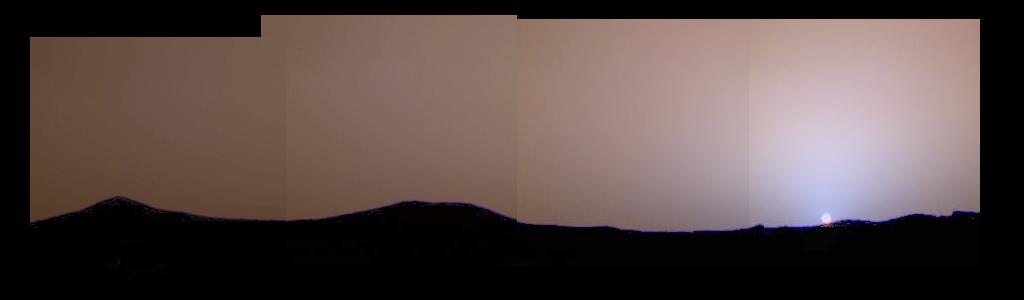
July 28 (Sol 24) |
This image of the Martian sunset from Sol 24 shows much
more color variation than had previously been seen. The blue color near
the Sun is not caused by clouds of water ice, but by the Martian dust itself.
The dust in the atmosphere absorbs blue light, giving the sky its red color,
but it also scatters some of the blue light into the area just around the
Sun because of its size. The blue color only becomes apparent near sunrise
and sunset, when the light has to pass through the largest amount of dust. |

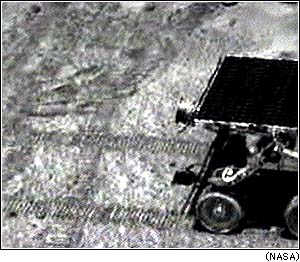
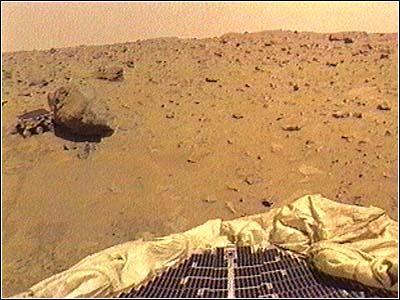
July 27 (Sol 23) |
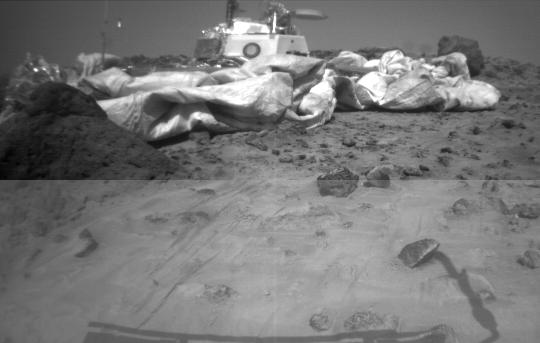
The IMP caught this image of the Rover as it was digging
in the "compressible" material near Casper to determine the soil's mechanical
properties.Shaggy is the large rock behind the Rover. |
 |
The Rover front right camera obtained this image when located
next to Pooh bear(rock at left) and Piglet (not seen) as it looks out toward
Mermaid Dune. The soil textures differ from the foreground where the soil
a poorly sorted mix of small rocks, fines and clods to the area a bit ahead
of the rover where the surface is covered with a bright drift material.Soil
experiments where the rover wheels dug in the soil revealed that the cloddy
material exists underneath the drift. |

July 30 (Sol 27) |
Diverse Rock Named Squash
This image from the Sojourner rover's right front camera was taken on Sol
27. The Pathfinder lander is seen at middle left. The large rock at right,
nicknamed "Squash", exhibits a diversity of textures. It looks very similar
to a conglomerate, a type of rock found on Earth that forms from sedimentary
processes. |

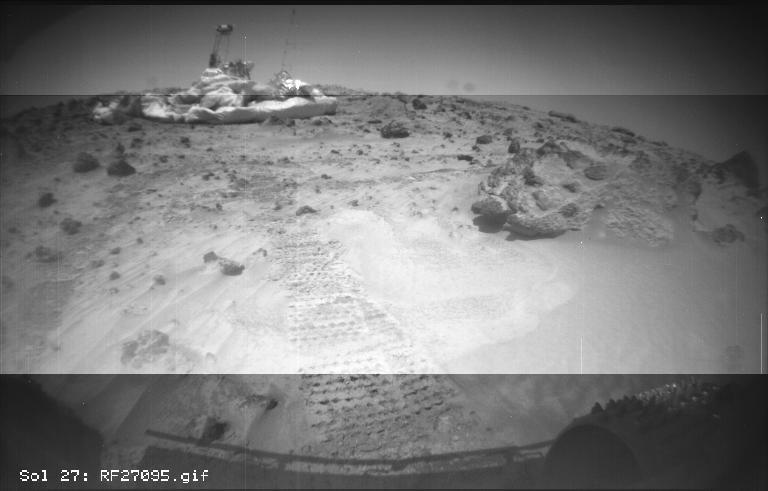
July 29 (Sol 26) |
Lander and Mini Matterhorn rock
One of the two forward cameras aboard the Sojourner rover took this image
of the Sagan Memorial Station on Sol 26. The angular resolution of the
camera is about three milliradians (.018 degrees) per pixel, which is why
the image appears grainy. The field of view of each rover camera is about
127 degrees horizontally and 90 degrees vertically.
Features seen on the lander include (from left to right): the Atmospheric
Structure Instrument/Meteorology Package (ASI/MET) mast with windsocks;
the low-gain antenna mast, the Imager for Mars Pathfinder (IMP) on its
mast at center; the disc-shaped high-gain antenna at right, and areas of
deflated airbags. The dark circle on the lander body is a filtered vent
that allowed air to escape during launch, and allowed the lander to repressurize
upon landing. The high-gain antenna is pointed at Earth. The large rock
Yogi, which Sojourner has approached and studied, as at the far right of
the image. Mini Matterhorn is the large rock situated in front of the lander
at left.
The horizontal line at the center of the image is due to differences
in light-metering for different portions of the image. The shadow of Sojourner
and its antenna are visible at the lower section of the image. The antenna's
shadow falls across a light-colored rock. |

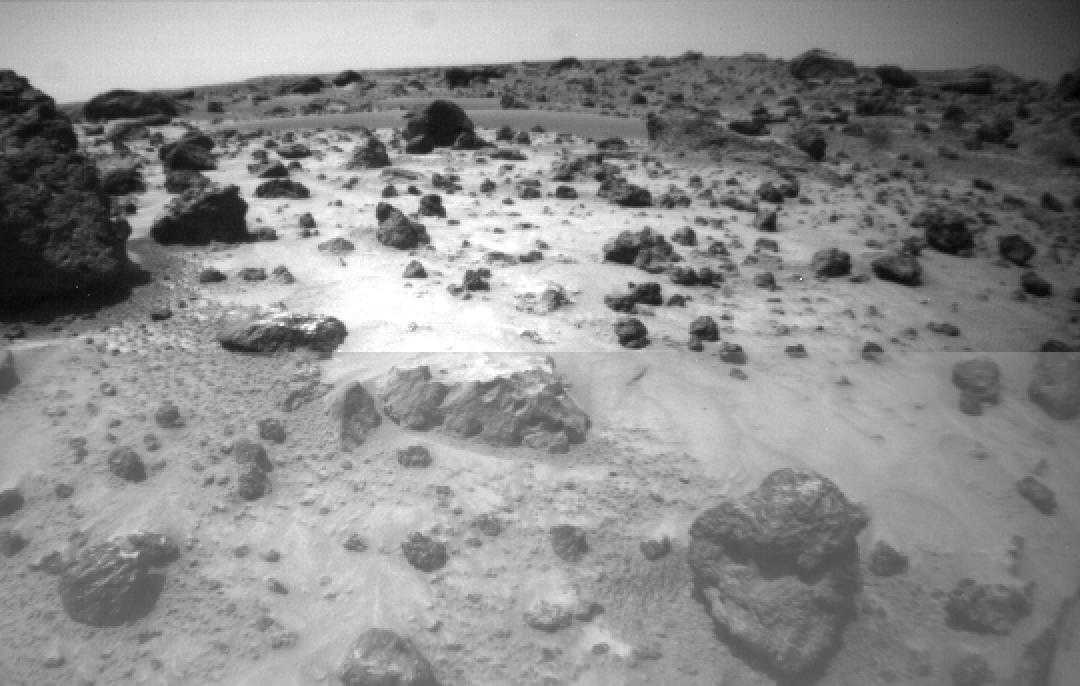
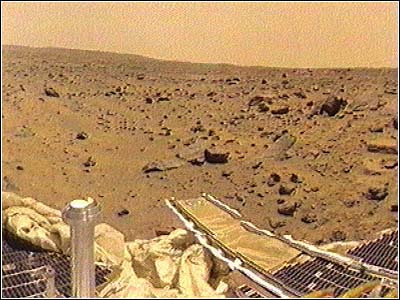
July 29 (Sol 26) |
Pooh Bear rock and Mermaid Dune
One of the two forward cameras aboard Sojourner imaged this area of Martian
terrain on Sol 26. The large rock dubbed "Pooh Bear" is at far left, and
stands between four and five inches high. Mermaid Dune is the smooth area
stretching horizontally across the top quarter of the image. The Alpha
Proton X-Ray Spectrometer (APXS) instrument aboard Sojourner will be deployed
on Mermaid Dune, and the rover will later use its cleated wheels to dig
into it. |

July 28 (Sol 25) |
Looking westward at the lander
One of the two forward cameras aboard the Sojourner rover took this image
of the Sagan Memorial Station on Sol 25. The camera uses a fisheye lens
which produces the illumination gradient in the sky on the western horizon.
The angular resolution of the camera is about three milliradians (.018
degrees) per pixel, which is why the image appears grainy.
Features seen on the lander include (from left to right): the Atmospheric
Structure Instrument/Meteorology Package (ASI/MET) mast with windsocks;
the low-gain antenna mast , the Imager for Mars Pathfinder (IMP) on its
mast at center; the disc-shaped high-gain antenna at right, and areas of
deflated airbags. The dark circle on the lander body is a filtered vent
that allowed air to escape during launch, and allowed the lander to repressurize
upon landing. The high-gain antenna is pointed at Earth. The large rock
Yogi, which Sojourner has approached and studied, as at the far right of
the image. |

(Sol 3) 82K
1 Mbyte, full size: 82475f.jpg |
|
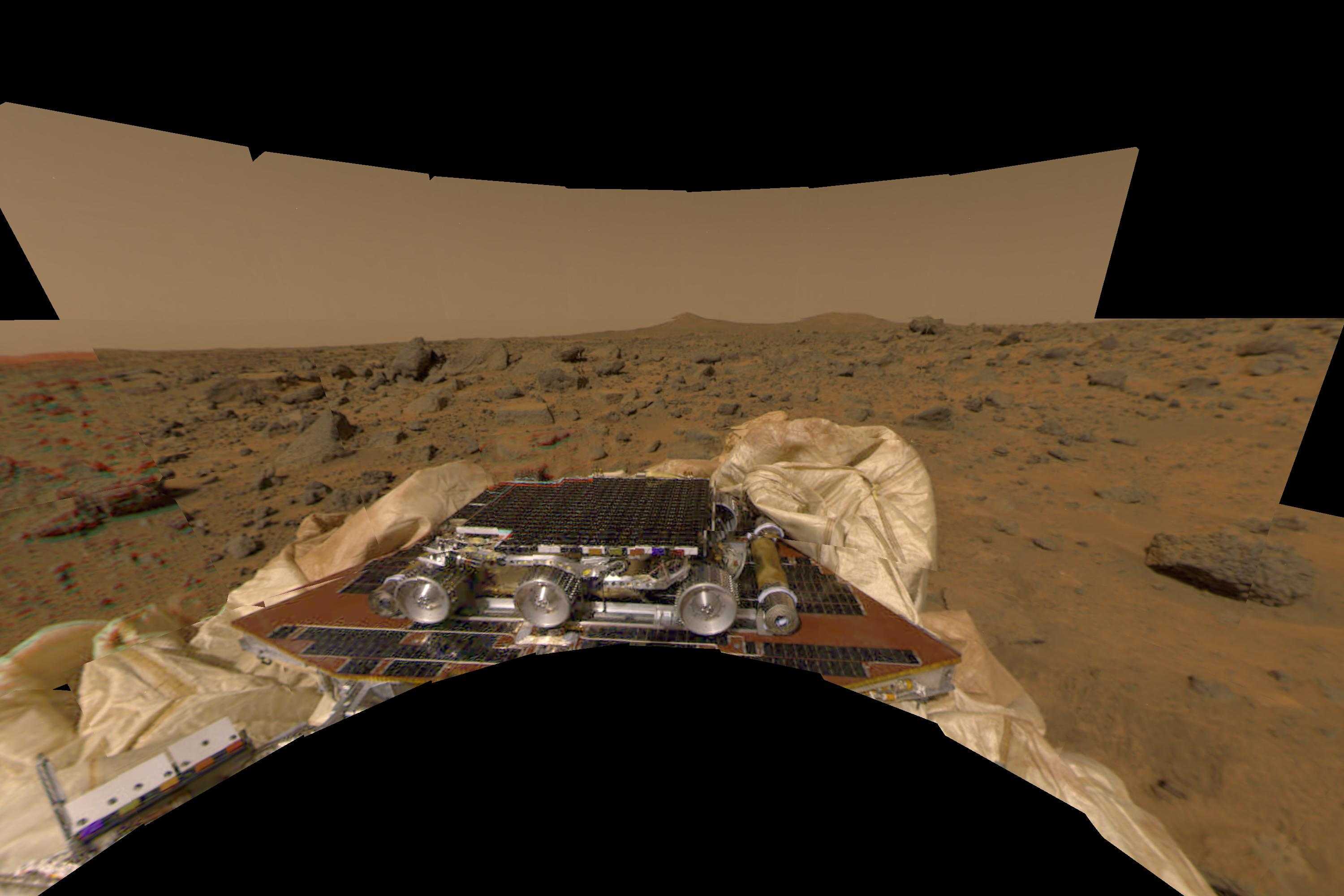
360-degree panorama in 3D
This 360-degree panorama was taken in stereo by the deployed Imager for
Mars Pathfinder (IMP) on Sol 3. 3D glasses (red left lens, blue right lens)
are necessary to help identify surface detail. All three petals, the perimeter
of the deflated airbags, deployed rover Sojourner, forward and backward
ramps and prominent surface features are visible, including the double
Twin Peaks at the horizon. Sojourner would later investigate the rock Barnacle
Bill just to its left in this image, and the larger rock Yogi at its forward
right.
The IMP is a stereo imaging system with color capability provided by
24 selectable filters -- twelve filters per "eye." It stands 1.8 meters
above the Martian surface, and has a resolution of two millimeters at a
range of two meters. Stereoscopic imaging brings exceptional clarity and
depth to many of the features in this image, particularly the ridge beyond
the far left petal and the large rock Yogi. The curvature and misalignment
of several sections are due to image parallax. |
|
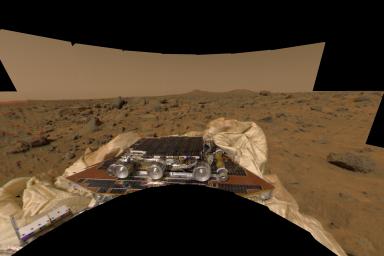 |
New perspective of undeployed rover
This image features a different perspecive of one of the first pictures
taken by the Imager for Mars Pathfinder (IMP) lander shortly after its
touchdown at 10:07 AM Pacific Daylight Time on July 4. The image has been
transformed to a perspective that would match that of an observer standing
at the point the image was taken. Sojourner is seen in the foreground in
its stowed position on a solar panel of the lander. Both ramps, the rear
of which Sojourner would use on July 5 to safely descend to the Martian
surface, were still undeployed when this image was taken. The double hills
called "Twin Peaks" are clearly visible in the background |
 |
Sojourner places her right front wheel on the rock Hassock.
Wedge is in the background. |
 |
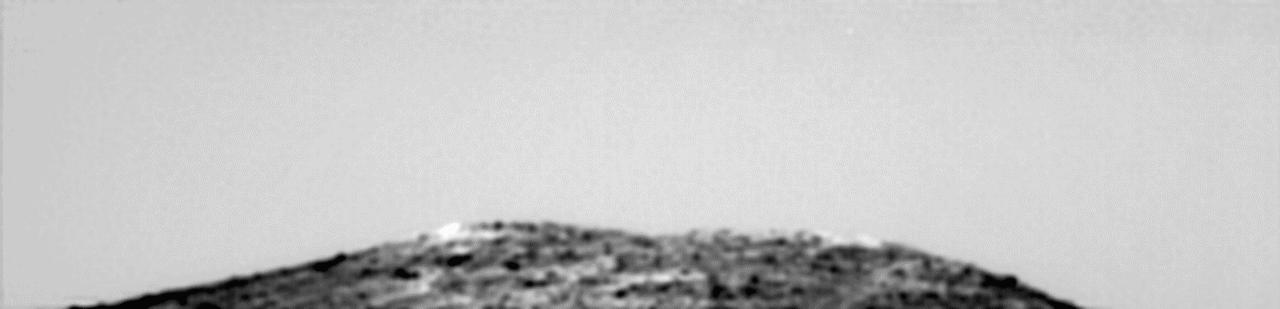
This enhanced image of North Peak (one of the Twin Peaks)...
is the result of combining 25 nearly-identical images taken by the IMP
camera, using a technique called super-resolution developed at NASA Ames
Information Sciences Division by Peter Cheeseman, Bob Kanefsky, Robin Hanson,
and John Stutz. |
 |
This enhanced image of the nearby rock named Wedge... is
the result of combining 25 nearly-identical images taken by the IMP camera,
using a technique called super-resolution developed at NASA Ames Information
Sciences Division by Peter Cheeseman, Bob Kanefsky, Robin Hanson, and John
Stutz. |
 |
This enhanced image with Big Crater in the background --
which turned out, serendipitously, to clearly show an object later identified
as the jettisoned back-shell -- is the result of combining 25 nearly-identical
images taken by the IMP camera, using a technique called super-resolution
developed at NASA Ames Information Sciences Division by Peter Cheeseman,
Bob Kanefsky, Robin Hanson, and John Stutz. |
 |
This enhanced image of the rock called Rindstone... is the
result of combining 25 nearly-identical images taken by the IMP camera,
using a technique called super-resolution developed at NASA Ames Information
Sciences Division by Peter Cheeseman, Bob Kanefsky, Robin Hanson, and John
Stutz. |
 |
A stereo version of the Sagan Memorial Station as viewed
by the Sojourner Rover. Images were combined from the two forward black
and white cameras on the rover and processed as red and blue separations
to produce this three dimensional scene. |
 |
This image is a view to the northeast of the lander and
is annotated to show the variety of rocks in this landing site and what
they tell us. The red arrows point to rounded boulders and rocks, thought
to have been shaped by the forces of water in flood (rough edges knocked
off by the tumbling action of the water). The blue arrows indicated rocks
with sharp edges and points, most probably ejected from nearby impact craters
and/or ancient volcanic activity. The white areas (of which Scooby Doo
is one) are believed to be deposits left behind by evaporating water, or
aggregates of materials fused together by the action of water. |
 |
This image is the clearest image yet of Yogi (with the Sojourner
Rover taking its Alpha Proton X-ray Spectrometer measurement). It clearly
shows the "two-toned" surface of this large rock. The nature of this color
difference is not known, however. It might consist of wind-blown dust accumulated
on the surface (the rock is leaning into the prevailing wind) or might
be evidence of a break from a larger boulder as it was deposited in the
ancient flood that scoured this area. |
  |
These images, color stretched and enhanced by Dr. Timothy
Parker, show where the airbags bounced and rolled on the surface, disturbing
soil and revealing darker material underneath the immediate surface, displacing
and compressing rocks into the soft surface. |
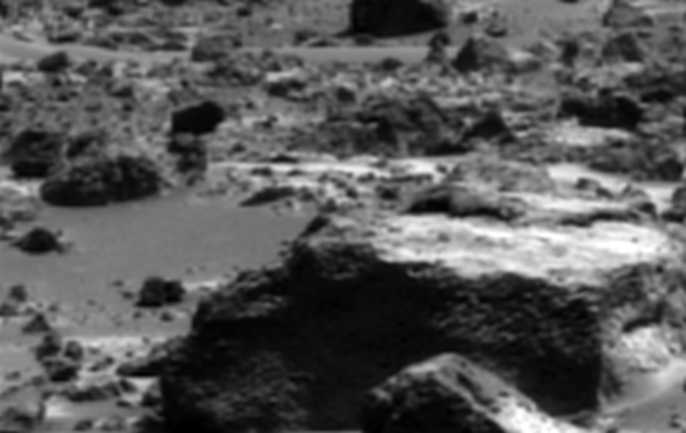
 |
This image shows the rightmost of the Twin Peaks in the
sharpest view yet. It was processed to bring out the stratification detail
in the hill. |
 |
Track marks in the soil. |
 |
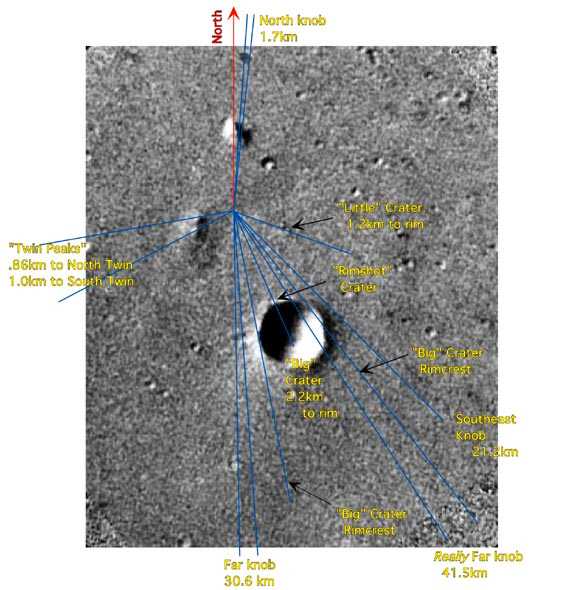
Where is Mars Pathfinder?.
A higher resolution
image shows the latest and most accurate placement of the actual
landing site, using enhanced Viking Orbiter images. |
 |
Animation of the rover's manoeuvres to approach "Yogi" (Sol
10)
[1378 K] |
 |
Animation of the rover going down the ramp
[517 K] |
 |
Animation of the martian sunset. This movie is made from
nine images of the twilight following sunset over Ares Vallis. The images
are enhanced in order to show the very subtle features in the haze, which
are probably caused by layers that are slightly dustier than the surrounding
air. The color is not the true color of the sunset -- that is shown in
other images. At the beginning, the Sun is on the horizon just to the right
of the frame, and it sinks during the next hour. At the time of the last
image the sky is only 1% as bright as at the beginning, but the IMP can
easily adapt to the darkness and return these pictures. Because there is
so much dust extending high into the martian sky, the sky stays bright
for more than an hour after sunset. |
 |
This image shows Mars' smaller moon, Deimos, as it appeared
to Mars Pathfinder on its third night after landing. Deimos is actually
only about two IMP pixels across -- it looks bigger because a set of low
resolution, compressed images (that is, they were blurry) was returned
to Earth. Observations of Deimos are used to determine its spectrum and
composition. Deimos is difficult to observe from Earth or the Hubble Space
Telescope because it is always very close to Mars. |
QuickTime VR Panorama
of the Sagan Memorial Station

















{kind=link}
{kind=link}