|
|
|
|
|
|
|
|
|
Data : febrer 2000 |
|
|
|
|
| RESUM DEL PROJECTE DAPLICACIÓ AMB EL SADEX | |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Objectiu del projecte |
|
|
|
|
Requeriments (especificacions tècniques) |
|
|
|
|
Material i equipament |
|
|
|
|
Descripció del projecte i funcionament |
|
Posta en marxa : TOTAL |
|
|
Entrades/sortides (mòduls utilitzats, vies...) |
|
Entrades polsadors : Teclat |
|
|
Llista del programa de control |
|
| Veure programa adjunt
: ascensor.log (Disponible en l'Aulatec de Cerdanyola)
proc inicio envia.byte "c 63 posa.a "p 0 posa.a "l 0 fi proc llamada motor1 "d "a si cl=0 [posa.a "l 0] si cl=1 [posa.a "l 1] si cl=2 [posa.a "l 2] fi proc piso si bit.llegit "b 0>0 [posa.a "p 0 envia.byte "c 63] si bit.llegit "b 1>0 [posa.a "p 1 envia.byte "c 6] si bit.llegit "b 2>0 [posa.a "p 1 envia.byte "c 6] si bit.llegit "b 3>0 [posa.a "p 2 envia.byte "c 91] fi proc subir motor1 "d "d piso fi proc bajar motor1 "d "e piso fi proc total espera 300 mentre [:p=:l] [llamada] mentre [:p<:l] [subir] motor1 "d "a mentre [:p>:l] [bajar] motor1 "d "a total fi |
|
|
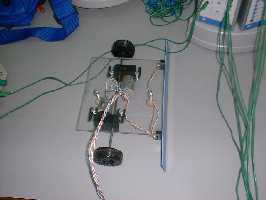
Esquemes / dibuixos / fotos |
|
|
|
|
Possibles millores |
|
|
|
|
Qüestions / activitats |
|
|
|
|
Valoració / conclusions |
|
|
|
|
|
|
||
|
|
||
|
Data : febrer 2000
|
||
| RESUM DEL PROJECTE DAPLICACIÓ AMB EL SADEX | ||
|
|
||
|
|
||
|
|
||
|
|
||
|
|
||
|
|
||
|
|
||
|
Objectiu del projecte |
||
|
||
|
Requeriments (especificacions tècniques) |
||
|
||
|
Material i equipament |
||
SADEX |
||
|
Descripció del projecte i funcionament |
||
|
||
|
Entrades/sortides (mòduls utilitzats, vies ...) |
||
Sensor luxòmetre |
||
|
Llista de programa de control |
||
| Veure programa adjunt
: Pont.log (Disponible en l'Aulatec de Cerdanyola)
proc pont1 desactiva.sortida "d 7 desactiva.sortida "d 4 desactiva.sortida "d 5 si luxmetre.llegit "a > 100 [sortides "d [7 0 4 1 5 1]] si luxmetre.llegit "a < 100 [sortides "d [7 1 4 1 5 0]] espera 300 desactiva.sortida "d 7 espera1.entrada "c 1 motors "b [1 d 2 d] espera1.entrada "c 3 atura.motor "b 2 espera1.entrada "c 2 atura.motor "b 1 espera1.entrada "c 4 motors "b [1 e 2 e] espera1.entrada "c 3 atura.motor "b 2 espera1.entrada "c 2 atura.motor "b 1 pont1 fi |
||
|
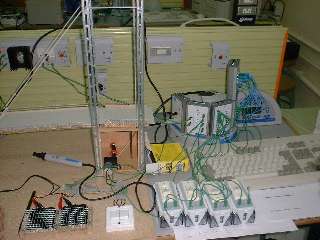
Esquemes / dibuixos / fotos |
||
|
||
|
Possibles millores |
||
Millora del sistema de transmissió per corda |
||
|
Qüestions / activitats / possibles activitats davaluació |
||
|
||
|
Conclusions |
||
|
|
|
|
|
||
|
|
||
|
Data : febrer 2000 |
||
|
|
||
| RESUM DEL PROJECTE APLICAT AMB EL SADEX | ||
|
|
||
|
|
||
|
|
||
|
|
||
|
|
||
|
|
||
|
|
||
|
|
||
|
Objectiu del projecte |
||
|
||
|
Coneixements previs i requeriments |
||
|
||
| Material i equipament | ||
|
||
| Funcionament: | ||
|
||
| Entrades/sortides (mòduls utilitzats, vies...) | ||
Luxòmetre amb el seu mòdul |
||
| Llista del programa de control | ||
| proc control
sortides "c [1 0 2 0 3 0 4 0 5 0 6 0 7 0 8 0] espera 30 si luxòmetre.llegit "b<50 [repeteix 300 [activa.sortida "c 8 si luxòmetre.llegit "b>50 [activa.sortida "c 1 espera 10 desactiva.sortida "c 1 espera 10 activa.sortida "c 2 espera 10 desactiva.sortida "c 2 espera 10 activa.sortida "c 3 espera 10 desactiva.sortida "c 3 espera 10 activa.sortida "c 4 si tecleig [p acaba] ] [activa.sortida "c 6]] [activa.sortida "c 6] fi Des de la finestra treball,
validar cada programa (en el nostre cas només en tenim un) amb un
return.
|
||
|
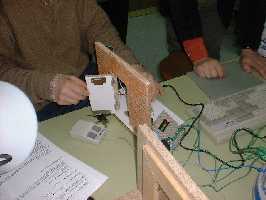
Esquemes / dibuixos / fotos |
||
|
||
|
Possibles millores |
||
|
||
|
Qüestions / activitats |
||
|
||
|
Valoració / conclusions |
||
| El treball en equip ha estat complementari doncs cadascú ha col·laborat en una determinada parcel·la: programació, electrònica, muntatge de la maqueta,... És clar que en un projecte com aquest no pot ser molt pretensiós tot just quan el temps i coneixement dels recursos emprats són insuficients. Tanmateix si que es pot albirar un ampli ventall de possibilitats de treball amb anàlisi de dades i control de processos, a nivell d´ESO o de Batxillerat, per a treballs de recerca o per crèdits variables d´ampliació |
|
|